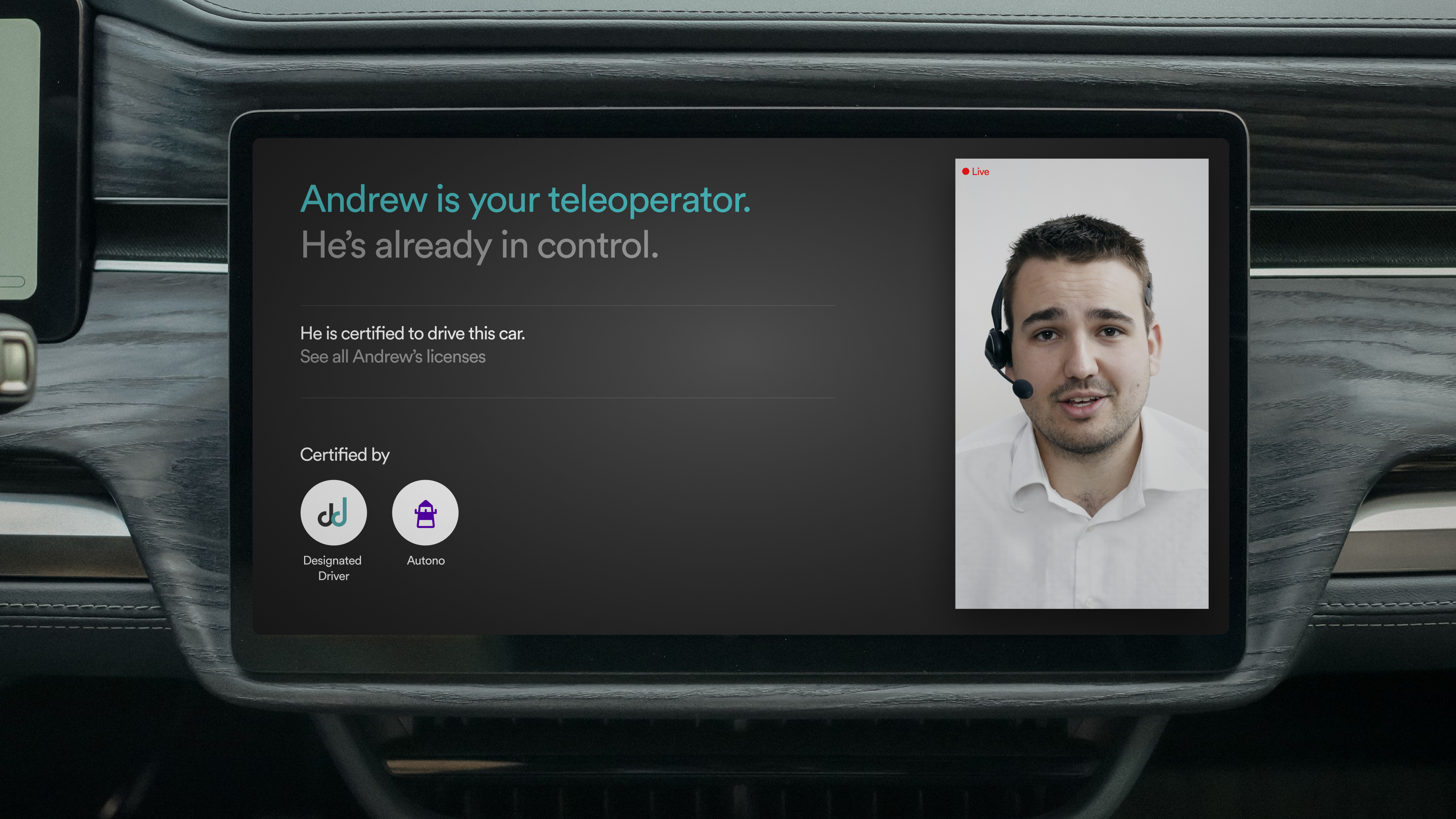
Envisioning The Autonomous Teleoperation Experience
Remote vehicle teleoperation serves as a critical backup to ensure the safety of passengers and cargo in autonomous vehicles. When AI systems encounter challenges they cannot handle, teleoperators step in to control the vehicles remotely. They are also essential for managing the "last mile" of trips where unpredictable conditions are most complex. We designed a comprehensive interface experience for teleoperators to communicate with passengers and manage scheduled and emergency pick-ups in driverless autonomous vehicles.



Manuela Papadopol
Chief Executive Officer, Designated Driver